






Uhnder的全數字4D軟件將推動汽車雷達過渡到DMR
Uhnder的全數字4D軟件定義成像雷達技術可增強分辨率和偵測能力,提升人員、道路與城市的安全性。用DCM取代傳統的模擬頻率調制的突破性架構實現了無與倫比的角分辨率和抗干擾性,還可以實現HCR,解析出傳統雷達傳感器在過去偵測不到的并列物體。這將推動汽車雷達過渡到DMR
文︱立厷
圖︱網絡
2020年11月,成立于2015年的美國初創公司Uhnder完成C輪融資,共募集1.45億美元,擬將其數字編碼調制(DCM)雷達芯片用在包括汽車在內的關鍵市場。相比目前的模擬雷達,Uhnder的數字4D軟件定義成像雷達可提供更高的性能。
Uhnder的技術何德何能,被譽為“汽車市場第一個數字成像、單芯片雷達解決方案”,到底好在哪里?大多數人還不甚了了,我們將其與傳統雷達做個比較。
供應鏈三方合作
早在2018年,Uhnder的第一個客戶麥格納(Magna)就在使用其數字片上雷達(RoC)的優勢部署下一代汽車級傳感器,研發4D掃描駕駛環境的高清雷達。
今年1月,麥格納宣布美國電動汽車制造商菲斯克(Fisker)的Ocean SUV高級駕駛輔助系統(ADAS)將搭載其采用Uhnder技術的Icon Radar,預計該車將于2022年底推出。
菲斯克是當年與特斯拉齊名、被稱為“特斯拉真正一生之敵”、經歷破產重生的電動汽車斗士Henrik Fisker的公司。最近其卷土重來,信息不少,如知難而退放棄了2018年之前就在研發的固態電池;首款量產車型Ocean由麥格納代工生產,將于2022年第四季度上市;第二款車型將與富士康共同開發,覆蓋亞洲市場。
這里主要聊聊為菲斯克注入了新的科技元素的數字汽車雷達。
傳統雷達是怎樣工作的?
雷達系統發射一個信號,并接收被反射的環境物體或目標的信號,然后對反射信號和發射信號的特性進行比較。單發射機單接收機雷達系統(單輸入、單輸出或SISO)可以估計環境中目標的距離和速度。
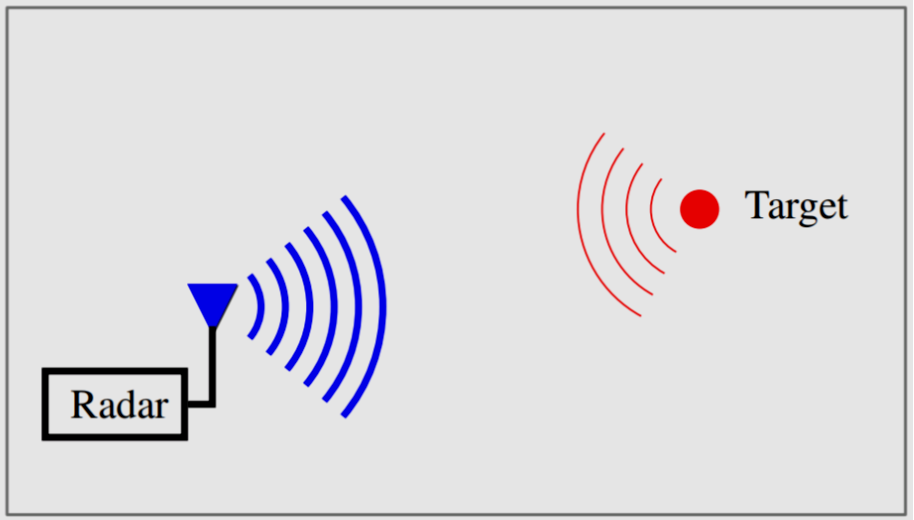
雷達工作原理
SISO雷達系統也可以估計物體的角度(方位角、仰角或兩者兼有),但必須采用機械或電子掃描。由于需要額外的掃描,快速運動物體的角度估計不是很準確。
多個發射和接收天線的雷達系統被稱為多輸入多輸出(MIMO)雷達系統,它包括兩個發射天線和三個接收天線。每個接收機需要知道來自Tx1和Tx2的信號的定時。因此,雷達系統創建了6個虛擬接收機系統(即2(Tx)x 3(Rx)=6個虛擬接收機)。
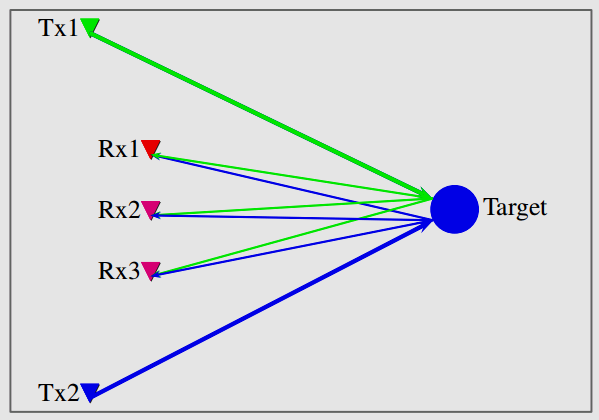
多發射接收天線雷達系統
MIMO雷達系統可以估計環境中物體的角度。一般來說,更多的天線(虛擬接收機)使得雷達系統的設計具有更寬的孔徑,從而具有更高的角度分辨率。雷達系統可直接測量被測物體的距離、徑向速度和方向。方向可以是方位角、仰角或兩者兼有,從而實現距離估計、速度估計和角度估計。
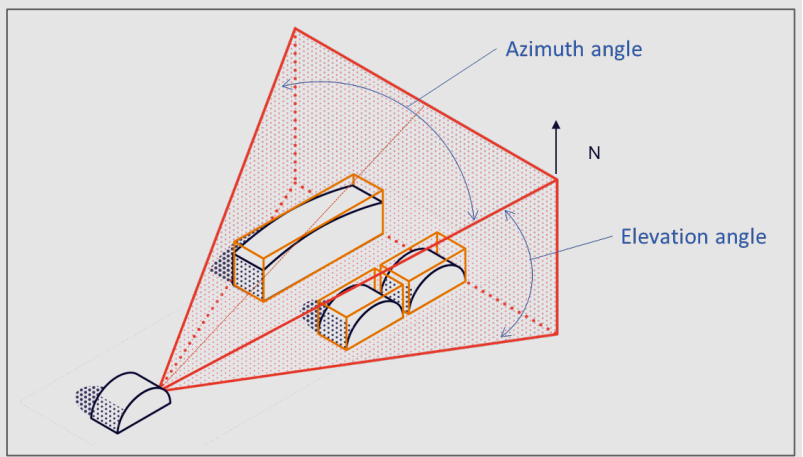
最大方位角和仰角定義視野
傳統上,在任何測量維度(距離、速度和角度),上述分辨率的雷達性能都是基于目標相同反射率或雷達散射截面(RCS)。然而,在汽車應用中,這個定義雖然非常重要,但還不夠。在這種應用中,雷達分辨距離大目標很近的小目標的能力也很重要,特別是其距離(如卡車前面的小孩)和角度(如護欄旁的行人)。因此,新方法引入了一種稱為“高對比度分辨率(HCR)”的概念,這對于確定雷達在駕駛中支持高水平自動化的程度至關重要。HCR代表雷達的接近程度,可以解析兩個目標的RCS在任何測量維度上的給定差異。
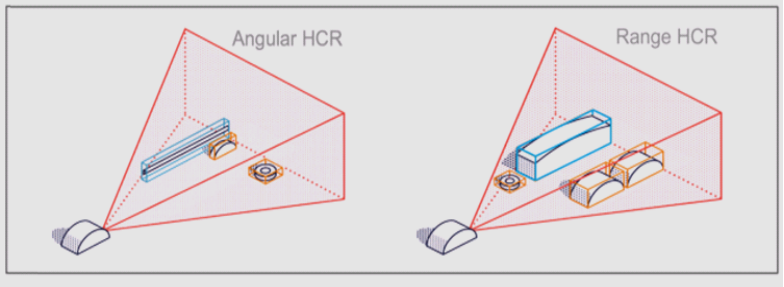
HCR有助于區分靠近大目標的小目標
駕駛自動化與雷達息息相關
今天,越來越多的汽車裝上各種雷達系統,如遠程雷達(LRR)、中程雷達(MRR)或短程雷達(SRR)。
LRR通常用于相當窄的角度區域內檢測遠距離(例如,高達300米)的物體,有助于緊急制動、碰撞警告和自適應巡航控制。
MRR具有更寬的視野,通常可以檢測150米以內的物體,并可以檢測十字路口(橫向)接近的物體,可以用于十字路口交通警報功能。
SRR可以在短距離內檢測寬角度區域內的物體,通常用于泊車輔助、十字路口交通警報、行人/自行車檢測、追尾警告和車道變換輔助。
為了確保更安全的駕駛以及自動駕駛(AD),一輛車可能包含多個LRR、MRR和SRR。一般來說,駕駛自動化水平越高,所需的傳感器數量就越多。
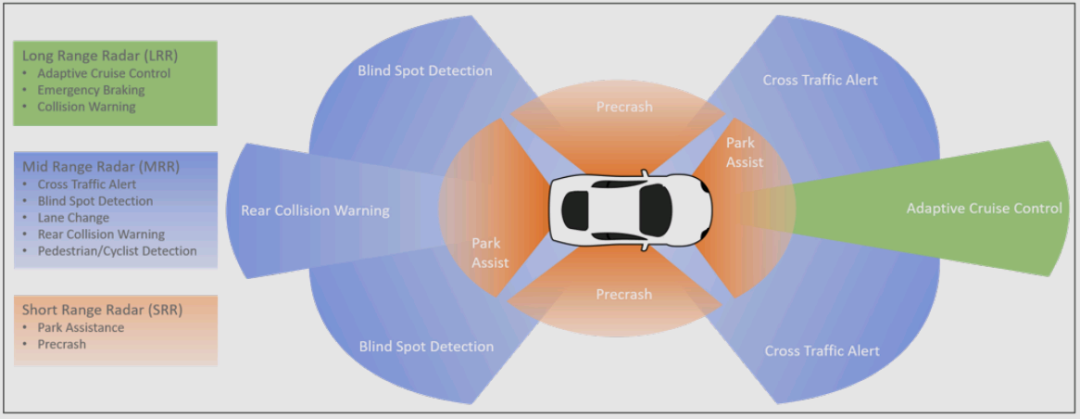
汽車中多個遠程、中程和短程雷達
為了提高現有汽車ADAS的性能和可靠性,克服向全自動駕駛(L5)發展的挑戰,汽車雷達系統需要提供更高的方位角和仰角分辨率,以及更好的精度和分辨力。這些先進的雷達能力是解決各種場景用例所必需的,這些用例對傳統雷達來說是具有挑戰性的。
如果沒有更高的分辨率、精度和更好的識別能力,雷達系統可能很難識別高速公路上的開闊車道、隧道入口處或橋下的熄火汽車、道路上的小碎片或汽車旁邊的騎車人。
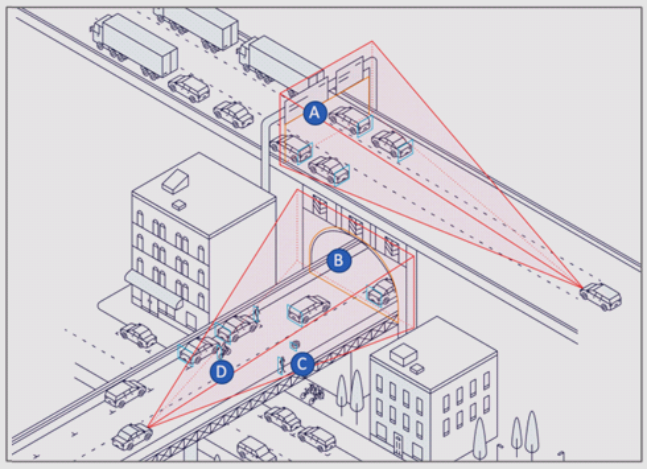
重要雷達用例
A.
數字雷達探測到一條開闊的車道,而其他雷達可能看到一堵3輛車寬的“墻”
B.
以高速行駛時,在安全制動距離下,數字雷達可探測到隧道和隧道中拋錨的汽車
C.
數字雷達可以發現輪胎或磚塊,早到足以改變車道或剎車,即使是以高速公路的速度
D.
數字雷達能探測到大物體旁邊的小物體,比如汽車旁邊的騎自行車的人。
此外,雷達必須對道路上的其他雷達提供更強大的抗干擾機制,特別是隨著越來越多地部署更高水平的自動化,汽車配備的雷達越來越多。雷達是一種特別容易受到自干擾(來自同一輛車上其他雷達的干擾)或交叉干擾(來自其他車上雷達的干擾)的技術。這種干擾敏感性是雷達廣泛部署的一個重要限制。
迄今為止,汽車上最常用的雷達技術是調頻連續波(FMCW)雷達,其最新版本稱為快速啁啾(chirp)調制(FCM)。另一種雷達類型是采用DCM的數字調制雷達(DMR)。
 分享
分享
請輸入評論內容...
請輸入評論/評論長度6~500個字

圖片新聞








最新活動更多
-
11月27日立即報名>> 【工程師系列】汽車電子技術在線大會
-
精彩回顧立即查看>> Works With 開發者大會深圳站
-
精彩回顧立即查看>> 【限時福利】TE 2025國際物聯網展·深圳站
-
精彩回顧立即查看>> 7月30日- 8月1日 2025全數會工業芯片與傳感儀表展
-
精彩回顧立即查看>> 【在線研討會】普源精電--激光原理應用與測試解決方案
-
精彩回顧立即查看>> 【工程師系列】汽車電子技術在線大會
推薦專題



